西工大新闻网8月7电(记者 赵珍 摄影记者 郭友军 司哲)近日,西北工业大学航海学院自主水下航行器团队研制的仿蝠鲼滑扑一体自主变形柔体潜航器试航成功,标志着我国在该领域进入世界先进水平。
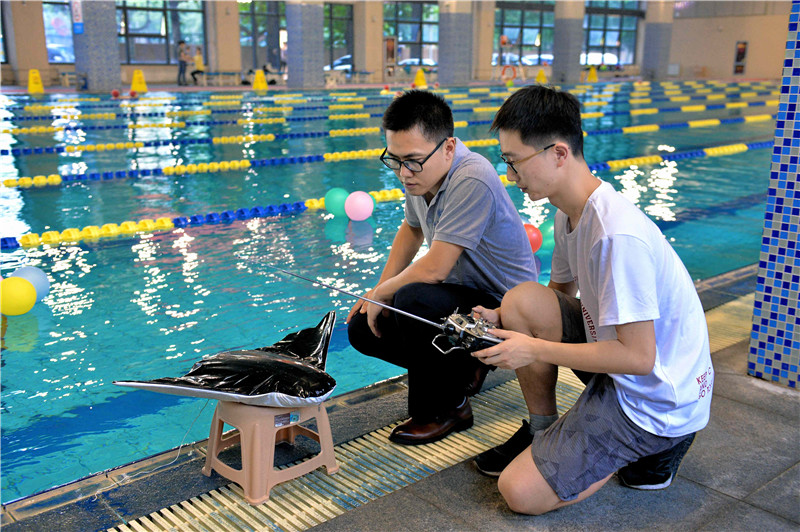
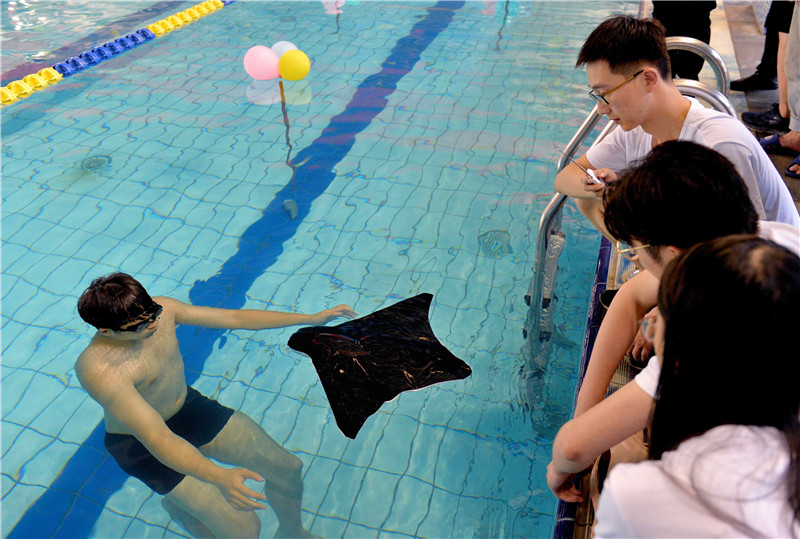
本次试航的潜航器属于原理验证样机,仿生蝠鲼的体貌和游动形态,翼展0.8米,由锂电池提供动力,最高时速1节。这只仿生鱼“背部”黝黑,“腹部”雪白,“头部”扁宽,“翅膀”(翼型鳍)则和身体融为一体。进入水中后,它一会儿扇动“翅膀”全速前行,一会儿灵巧地转着圈儿,一会儿似动非动地漂浮在水面,一会儿又一个猛子潜入水底……

“目前,我们已经可以实现这只仿生蝠鲼的扑动、滑翔、急停、转弯等动作,与真实蝠鲼几乎没有差别。”站在岸边遥控潜航器的曹勇老师对记者说。
蝠鲼是一种生活在热带和亚热带海域底层的软骨鱼类,具有流线型的扁平躯体,这种形态有利于扑动推进和下潜滑行,且在运动流场时能有效借助流体的能量实现更高效率的滑行运动。这充分满足长航时、大范围作业的水下推进器的仿生需求。
西北工业大学航海学院的自主水下航行器团队利用高速相机对蝠鲼进行活体观测研究,对其滑翔与扑动产生的多模式高机动与高效率运动姿态(前游、倒游、偏航、俯仰、急停、翻滚等)进行分析,最终建立了蝠鲼的外形参数模型与运动参数模型,进而研制出了我国首款滑扑一体自主变形仿生柔体潜航器。

自主变形仿生柔体潜航器是国家科技部重点支持的研究项目。利用仿生蝠鲼运动原理而研制的柔体潜航器,具有高推进效率、高机动性、高稳定性、低环境扰动、低噪声,以及大负载空间、大负载能力、海底软着陆等特点。因此能更好地达到水下航行器的高机动和长续航能力。
该项目负责人、西北工业大学航海学院院长潘光教授介绍,研究团队正在开展三型工程样机的研制。其中,I型样机翼展2米,采用刚性机翼,主要验证滑翔能力;II型样机翼展3米,机翼尖端部分为柔性,主要验证滑翔为主、扑动为辅的能力;III型样机翼展2米,机翼全柔性,主要验证接近蝠鲼的生物滑扑一体推进能力。

下一步,团队还将为滑扑一体柔体潜航器装上“耳朵”和“眼睛”,让它具备环境感知能力和地貌观测能力,以期用于海洋环境信息长期观测和海底科考目标定点持续观察。
潘光教授介绍,不久的将来,团队将推出具备1000米下潜深度、可持续工作1个月的柔性潜航器。“它在海里将与蝠鲼别无二致。”
(审稿:雷军)




