一、会议时间:2021年7月3日
二、会议地点:西北工业大学翱翔国际会议中心-创新大厦B座,5楼翱翔厅
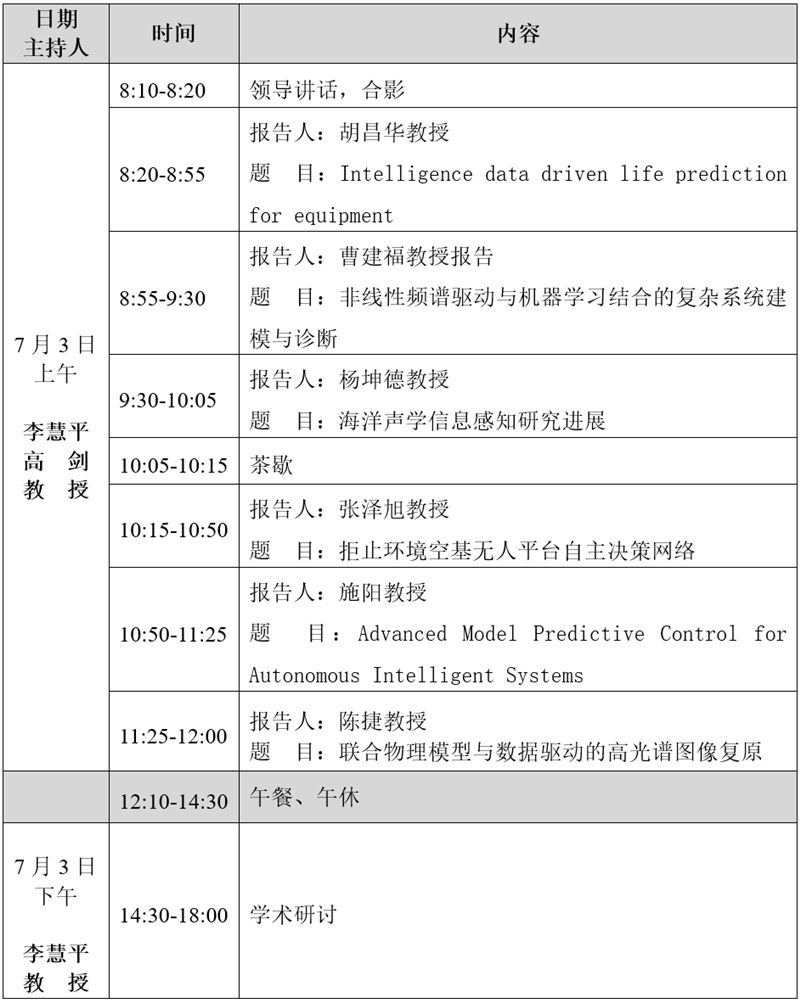
三、会议日程
四、报告内容及专家介绍
报告内容简介
Reliable Control Technology of Equipment Life Cycle
Reliability design, reliability analysis and reliability experiment, fault-tolerant control, fault diagnosis, fault prognosis, residual useful life prediction,predictive maintenance and health management, all of these reliable control technology are discussed systematically in this report.
专家简介

胡昌华,导航制导与控制国家重点学科带头人、测试与控制技术国家虚拟仿真中心主任,国家杰出青年科学基金获得者,国家教学名师,教育部自动化类教学指导委员会委员,中国自动化学会常务理事、技术过程故障诊断与安全性委员会副主任,陕西省自动化学会副理事长,主要研究自动测试与制导、故障诊断与寿命预测等,出版专著7部、教材一部,一部教材入选国家规划教材,发表论文300余篇,SCI收录62篇,SCI他引1268次,获国家科技进步二等奖1项,省部级科技进步一、二等奖9项,当选全国优秀科技工作者,新世纪百千万人才国家级人选、国家有突出贡献的中青年专家,中国科协“求是”杰出青年实用工程奖,中国科协八大代表,享受政府特殊津贴专家。
报告内容简介
结合数据驱动与深度学习算法的非线性系统建模与故障诊断
机器人、飞行器、数控装备等各类复杂机电系统,通常是属于非线性系统,对非线性系统建模与故障诊断研究具有非常重要的理论和工程价值。数据驱动、机器学习方法是国际上的热门研究方向,特别是深度学习算法被学术界普遍关注。然而在建模与诊断问题方面,由于复杂机电系统自身的物理与非线性动态特性,单纯的机器学习算法有较大的局限性,很难在实际系统中成功应用。本报告将以机器人、数控机床、航空发动机等复杂系统为应用背景,重点讨论结合数据驱动与机器学习算法的非线性系统建模与诊断算法,同时介绍研究团队在智能机器人及数控机床故障诊断方面的研究成果。
专家简介

曹建福,教授/博导,陕西省自动化学会副理事长兼秘书长。现任西安交通大学自动控制研究所所长,兼任陕西省自动化学会副理事长兼秘书长,中国自动化学会理事,中国自动化学会建筑机器人专业委员会主任委员。西安交通大学计算机专业本科毕业、系统工程专业硕士和博士毕业。主要从事机器人控制、复杂系统控制与诊断、智能制造等方向研究。入选江苏省“333”高层次人才工程第二层次,曾为某部属大型研究所工程师,主持国家“75”科技攻关、国家自然科学基金、重点研发计划等国家及省级课题40多项;获省部级以上科技奖励5项,其中获1项国家科技进步二等奖(排名第2)。
报告内容简介
海洋声学信息感知研究进展
阐述深海传播建模与特性、海洋噪声建模与特性、海洋声场相关特性、海洋声场干涉特性、深海水下声源定位理论与技术、深远海声学科学考察的进展等。
专家简介

杨坤德,西北工业大学航海学院教授,博士生导师。现任西北工业大学航海学院副院长、“海洋声学信息感知”首批工信部重点实验室主任、国家级重点实验室副主任。长期从事海洋声学、水声信号与信息处理、海上信息传输等方面的研究。先后主持国家自然科学基金、国家重大专项、探索一代重大创新、重点预研等课题30余项,担任国家重大专项海洋声学调查航次技术首席7次。获国家技术发明二等奖(排第1)与省部级科技奖7项,发表SCI论文130余篇,授权专利60余项,出版专著教材6部。被授予“国家级科技创新领军人才”、“卓越青年人才”、“科技部中青年科技创新领军人才”、“教育部新世纪优秀人才”、“陕西省优秀青年科技新星”等荣誉称号,获国务院政府特殊津贴。
报告内容简介
拒止环境空基无人平台自主决策网络
未来ZZ加速向“三化融合”的智能化ZZ转变,分布式自主化的ZZ编队与集群将是未来装备的重要形态之一,智慧智能的力量体系逐步成形,诸多小编队小集群的自适应融合作战成为重要的ZZ组织方式。
提出仿生“蝇群”的高不确定性空基无人平台自主袭扰/攻击系统,创建“招之即来,挥之不去”的高不确定性空基无人平台自主协同决策网络,执行对恶意目标抵近、对峙、纠缠与攻击。探索弱社会性群体智能与非自觉性群体协同科学问题,建立“广域泛在+任务智能”为特征的网络信息体系,实现从物理域、信息域到知识域的拓展,增强从感知到适变的网络智能,对物理打击、电磁干扰和网络攻击做出适变响应,对环境态势进行不同颗粒度等级的感知,并依据任务优先级迅速做出决策。
专家简介

张泽旭,教授/博士生导师,哈尔滨工业大学飞行器动力学与控制研究所所长,航天学院院长助理。某重大项目技术首席,国家重大科技专项“空间在轨服务与维护”论证专家,载人月球探测论证专家。中国空间科学学会常务理事,中国空间科学学会空间智能专业委员会主任,中国指控学会指挥与控制网络专业委员会委员。
长期从事无人集群智能协同感知与自主决策、飞行器自主导航与控制、数据可视化应用等方面的研究。出版专著1部,发表学术论文60余篇,获国家发明专利12项,获省部级科技进步二等奖1项。主持国家自然科学基金、863项目、预研课题等课题10余项,培养研究生60余名。
报告内容简介
Advanced Model Predictive Control (MPC) Framework for Autonomous Intelligent Systems
Autonomous intelligent systems, which lie at the intersection of unmanned systems, robotics, systems and control, multi-agent systems, networked and distributed systems, machine learning, etc. Autonomous intelligent systems are equipped with abilities such as sensing and perception, data processing and information fusion, intelligent decision making, autonomous control, learning and adaption, communications and computation, thus can achieve a high level of autonomy to perform missions without human intervention or can naturally interact and collaborate with humans and/or environment. The fundamental control theory and methods in autonomous intelligent systems are of central importance in orchestrating all related functions. Autonomous control and intelligence can be applied to various systems, e.g., aerial vehicles, marine vehicles, ground robots, space exploration, energy and power systems, transportation and smart city, intelligent agriculture, smart manufacturing, smart health care systems, Internet of Things, etc. Model predictive control (MPC) is a promising paradigm for high-performance and cost-effective control of autonomous intelligent systems. This talk will firstly summarize the major application requirements and challenges to innovate in designing, implementing, deploying and operating autonomous intelligent systems. Further, the robust MPC and distributed MPC design framework will be presented. Finally, the application of MPC algorithms to various autonomous intelligent systems will be illustrated.
专家简介

施阳,加拿大维多利亚大学教授,Fellow of Engineering Institute of Canada (加拿大工程研究院), IEEE Fellow, ASME Fellow和CSME Fellow。1994年和1998年在西工大航海学院获得学士和博士学位;2005年于加拿大阿尔伯塔大学获得电子与计算机工程博士学位。2005-2009在加拿大萨斯喀彻温大学任助理教授及副教授;目前为加拿大维多利亚大学机械工程系终身教授。 施阳博士的研究集中于工业信息物理系统、网络及分布式控制系统、模型预测控制、机电系统及机器人系统设计与控制、能源系统的优化调度与控制等。2007获得加拿大萨斯喀彻温大学十佳教学奖;2012年获得维多利亚大学工学院最佳教学奖。2015年获得维多利亚大学年度唯一的最佳研究银奖(Craigdarroch Silver Medal);2013年获得日本学术振兴会特邀访问教授奖;2017年获得德国洪堡研究基金。他与学生合著的论文获得2017年IEEE Transactions on Fuzzy Systems年度最佳论文奖。目前任IEEE工业电子学会工业信息物理系统技术委员会主席,担任IEEE Transactions on Industrial Electronics的共同主编(Co-Editor-in-Chief),任多家国际期刊的副编辑,包括:Automatica, IEEE Transactions on Control Systems Technology, IEEE Transactions on Cybernetics, IEEE/ASME Transactions on Mechatronics。
报告内容简介
联合数学优化与深度学习的高光谱图像复原研究
高光谱图像由于其图谱合一的特点,在遥感、农业、工业领域具有广泛的应用,然而其在成像过程中存在不同的图像质量退化过程:基于数学优化的方法可以根据图像退化的物理模型,灵活地处理不同的复原问题, 但通常需人工定义恰当的图像先验知识,且复杂先验常会带来较大的求解难度;基于深度学习的方法采用数据驱动的方式,能较好地挖掘图像特性,当训练和测试数据特性匹配时能够获得优异处理结果,但是当前深度神经网络参数多、可解释性低、导致这类方法泛化能力有限。因此,从物理模型和数据驱动两方面综合入手,研究数学优化和深度学习的有机联合,实现精确高效的高光谱图像复原算法,具有重要的理论意义和实际价值。
专家简介

陈捷,西北工业大学教授、博导、国家级青年人才。2009年获得法国特鲁瓦工程技术大学博士,先后在法国尼斯大学、美国密歇根大学从事研究工作。主要从事智能信息处理、图像处理、声信号处理领域内的研究共走。2016年作为技术委员会主席举办国际声信号增强会议,2018年获得亚太信号与信息处理协会 “杰出讲师” 称号,2019年作为主席举办IEEE信号处理协会智能信号与信息处理暑期学校,2020年获得IEEE VCIP大会近红外图像处理大赛冠军,2022年将作为主席举办IEEE机器学习与信号处理国际大会。
(审稿:杨坤德)




